Il nuovo materiale nasce dall’imitazione della pelle del polpo, in un progetto di IIT con la Cornell University, Usa.
In un articolo pubblicato su Science, il team di ricerca composto dai robotici della Cornell University (USA) e dell’IIT ha mostrato la realizzazione di un nuovo materiale tattile soffice, luminoso e allungabile, da utilizzare in futuro come pelle hi-tech per i robot. La nuova tecnologia trae ispirazione dai tessuti morbidi del polpo, studiati in particolare dalle due autrici del gruppo, le italiane Barbara Mazzolai e Lucia Beccai, ricercatrici all’IIT di Pontedera, Pisa. La nuova pelle è stata integrata in un robot soft dimostrandone l’utilizzo sia per il controllo della postura del robot, sia per rendere il soft robot sensibile all’ambiente circostante.
I tessuti della pelle dei cefalopodi, in particolare dei polpi, hanno un’elevata flessibilità ed estensibilità. Tali caratteristiche biomeccaniche, insieme alla capacità di emettere e assorbire luce, permettono a questi organismi di controllare sia la propria postura sia la luce. Inoltre la loro pelle è sensibile al tatto. Imitando queste proprietà, i ricercatori hanno realizzato un tessuto artificiale, la Highly Stretchable Electroluminescent Skin (HLEC), ovvero una pelle artificiale con funzioni tattili che può estendersi fino a quasi 5 volte le proprie dimensioni e si illumina con vari colori creando un display tattile soft.
Il nuovo materiale HLEC è stata realizzato nei laboratori della Cornell University e testato presso il Centro di Micro-Bio Robotica (CMBR) di IIT, coordinato da Barbara Mazzolai, dal team che si occupa dello sviluppo di sistemi tattili soft artificiali guidato da Lucia Beccai, con il contributo di Massimo Totaro, ricercatore post-doc di IIT.
I ricercatori hanno ottenuto il nuovo tessuto combinando materiali soft conduttivi, elettroluminescenti e isolanti. Il materiale conduttivo è rappresentato da un idrogel ionico, la parte isolante è costituita da silicone, mentre il composito elettroluminescente ha una matrice siliconica e polveri di fosforo semiconduttore. Quest’ultimo emette diversi colori a seconda della propria composizione quando viene applicato un campo elettrico. In particolare integra microparticelle di ZnS (solfuro di zinco) drogate con dei metalli come il rame e il manganese – queste combinate tra loro producono vari colori come l’arancio, il blu e il verde. La particolarità di questa pelle elastica è che quando viene deformata si illumina a una diversa intensità a seconda della deformazione. Al contempo la pelle rileva sia le pressioni provenienti dall’esterno sia la deformazione indotta; queste caratteristiche sono state sperimentate dai ricercatori IIT presso il Centro di Micro-BioRobotica.
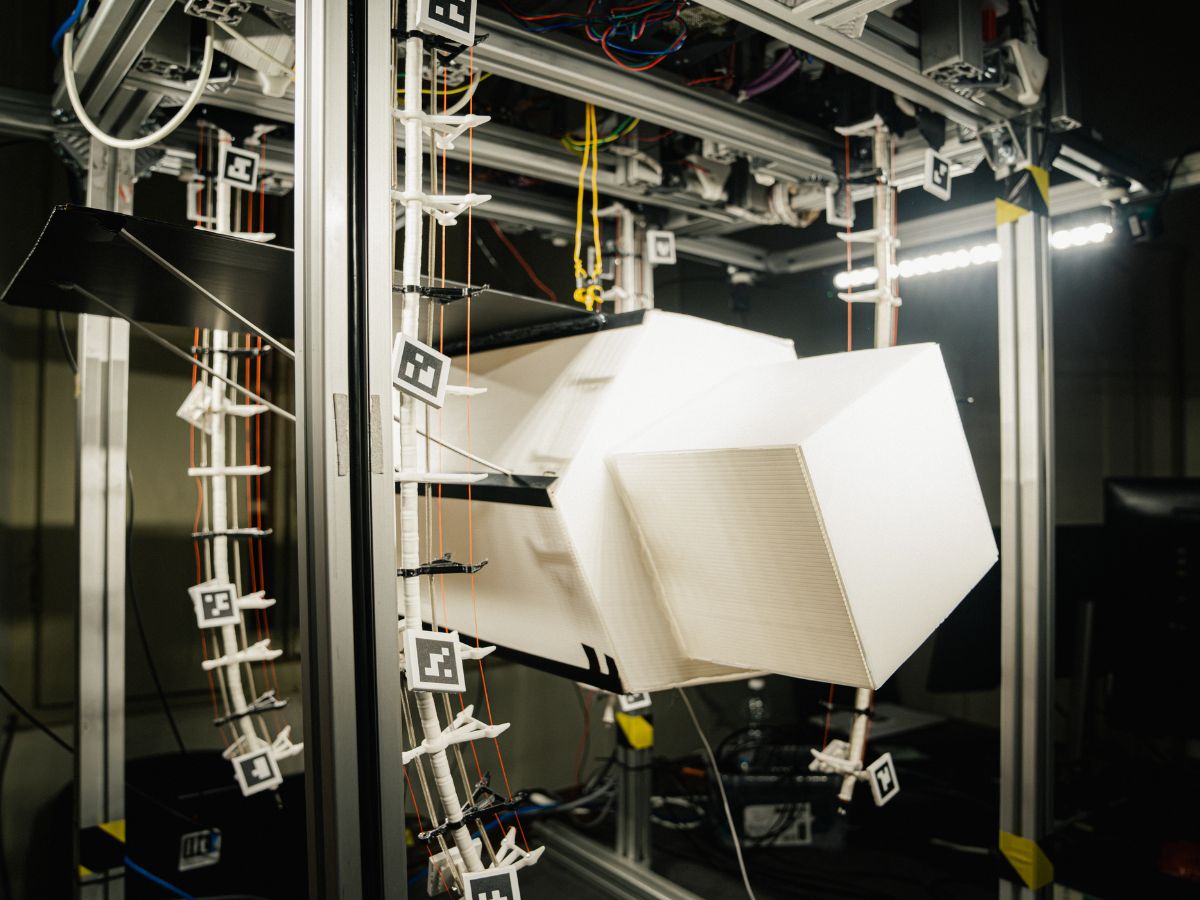
I ricercatori della Cornell University hanno utilizzato la pelle per rivestire un soft robot che può muoversi grazie a un’attuazione pneumatica. Quando il robot viene attuato per generare un movimento le camere in silicone sensorizzate di cui è costituito si gonfiano e deformano per poi tornare alle dimensioni originali. Grazie all’integrazione della HLEC si è dimostrato per la prima volta che un soft robot riesce ad avere delle proprietà sia propriocettive – quindi a ‘sentire’ la propria postura e controllarla – sia esterocettive, ovvero sentire il tocco e le pressioni esterne, e ciò gli permette di ‘capire’ come esplorare l’ambiente. Questa nuova pelle permetterà ai robot del futuro di potersi muovere in luoghi difficili e non strutturati, camuffandosi e interagendo con gli uomini anche tramite i colori e l’illuminazione.
La collaborazione tra IIT e la Cornell University sulla robotica soft bioispirata, di cui il CMBR di IIT è tra i leader a livello mondiale, contempla anche altri lavori in corso e uno scambio di ricercatori e dottorandi tra i due gruppi.