Un gruppo di ricerca dell’Istituto Italiano di Tecnologia in Italia e dell’Imperial College London nel Regno Unito stanno lavorando alla progettazione di arti bionici che offrano agli utenti una sensazione di naturalezza durante il loro utilizzo
In uno studio recente pubblicato su Science Robotics, i ricercatori hanno dimostrato l’esistenza di una connessione tra gli schemi di movimento della mano e quelli di controllo dei motoneuroni, e hanno applicato tale scoperta a una mano protesica morbida, la quale è stata testata con successo da persone con e senza disabilità fisiche.
La ricerca è frutto della collaborazione tra due team di ricerca, uno all’Istituto Italiano di Tecnologia (IIT) a Genova guidato da Antonio Bicchi, e l’altro all’Imperial College London, guidato da Dario Farina. Una collaborazione che nasce grazie al progetto “Natural BionicS” finanziato dall’ERC, il cui obiettivo è superare il modello delle protesi attuali, spesso abbandonate dai pazienti perché non rispondono in modo “naturale” ai loro bisogni di movimento e controllo.
Affinché il sistema nervoso centrale riconosca l’arto bionico come “naturale”, è essenziale che la protesi interagisca con l’ambiente nello stesso modo in cui lo farebbe un arto reale. Per questo motivo, i ricercatori ritengono che le protesi debbano essere progettate secondo la teoria delle sinergie sensomotorie e con tecnologie di robotica “soft”, così come proposte per la prima volta dal gruppo di Antonio Bicchi all’IIT, quali la mano robotica Soft-Hand. L’idea di base è che, se si riesce a creare un’interfaccia naturale tra il sistema nervoso dell’essere umano e un corpo artificiale, le implicazioni potrebbero andare oltre le protesi, consentendo ad esempio un’integrazione fluida tra umani e parti robotiche per assistere, potenziare e ampliare le nostre capacità.
Lo studio pubblicato su Science Robotics dimostra per la prima volta che due strutture fondamentali che organizzano il nostro corpo, ossia le sinergie a livello dei motoneuroni spinali e quelle a livello dei comportamenti della mano, sono collegate. Le sinergie sono gli schemi di attivazione muscolare e di movimento articolare del corpo umano.
I ricercatori hanno scoperto che le posture della mano possono essere interpretate come il risultato osservabile di strutture neurali sottostanti all’interno del sistema nervoso centrale. Tali strutture sono accessibili e possono essere decodificate utilizzando algoritmi avanzati applicati ai segnali elettrici registrati a partire dai nostri muscoli. Questi segnali sono la manifestazione periferica dell’attività delle cellule nervose nel midollo spinale che guidano le contrazioni muscolari. Una volta decodificata l’attività di queste cellule, è possibile identificare specifici raggruppamenti cellulari che sottendono il comportamento della mano. Questo risultato non solo migliora la comprensione dei meccanismi neurali che regolano il controllo motorio, ma apre nuove possibilità per lo sviluppo di interfacce uomo-macchina più intuitive ed efficaci.
I ricercatori possono ora progettare mani robotiche multi-sinergetiche guidate da algoritmi di decodifica neurale, così che gli utenti di protesi possano ottenere un controllo naturale dell’arto, prendendo posture infinite ed eseguire compiti complessi, inclusa la manipolazione all’interno della mano, non realizzabili con altri approcci.
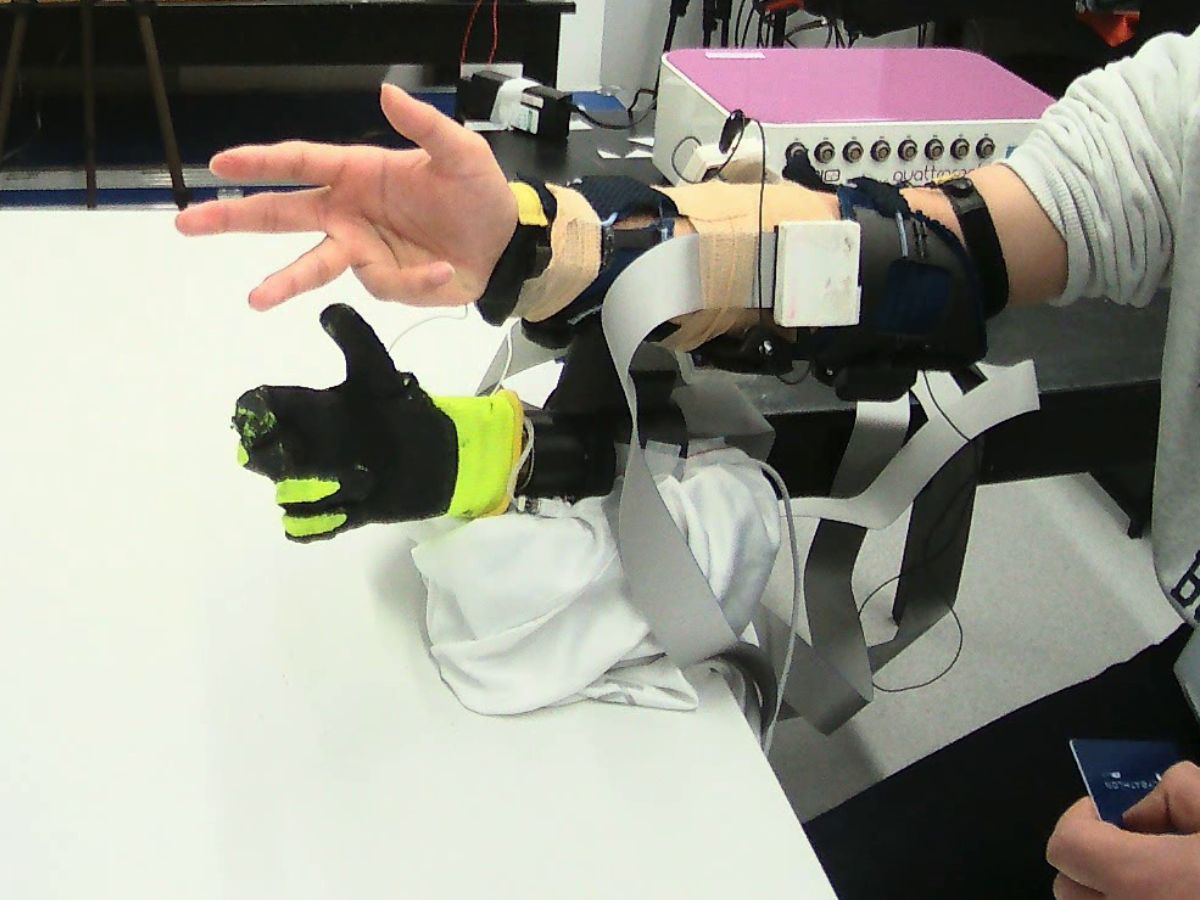
Più specificamente, i ricercatori hanno progettato una mano protesica morbida con due gradi di attuazione, che consente di eseguire posture guidate da due principali sinergie posturali. Questo design innovativo è stato testato in scenari in tempo reale da 11 partecipanti senza disabilità fisiche e 3 utenti di protesi.
Per ottenere un controllo senza soluzione di continuità, il team ha sviluppato un metodo avanzato online che mappa le sinergie neurali decodificate nel funzionamento continuo della mano protesica a due sinergie. I risultati hanno dimostrato che l’integrazione di sinergie neurali e posturali consente un controllo preciso, naturale e coordinato delle azioni multidito. Questo approccio non solo garantisce movimenti più fluidi e intuitivi, ma rappresenta anche un significativo passo avanti nella creazione di dispositivi protesici che imitano da vicino la funzionalità e la fluidità degli arti naturali.
Tali progressi hanno profonde implicazioni per il miglioramento della qualità della vita degli utenti di protesi, offrendo loro maggiore autonomia e una connessione più naturale con i loro arti artificiali.
Link alla pubblicazione:
“Merging motoneuron and postural synergies in prosthetic hand design for natural bionic interfacing”, Science Robotics, 15 gennaio 2025



