La ricerca svolta tra Genova e gli Stati Uniti servirà per migliorare la progettazione dei robot. Pubblicata sulla rivista IScience è stata supportata da finanziamenti dell’ERC
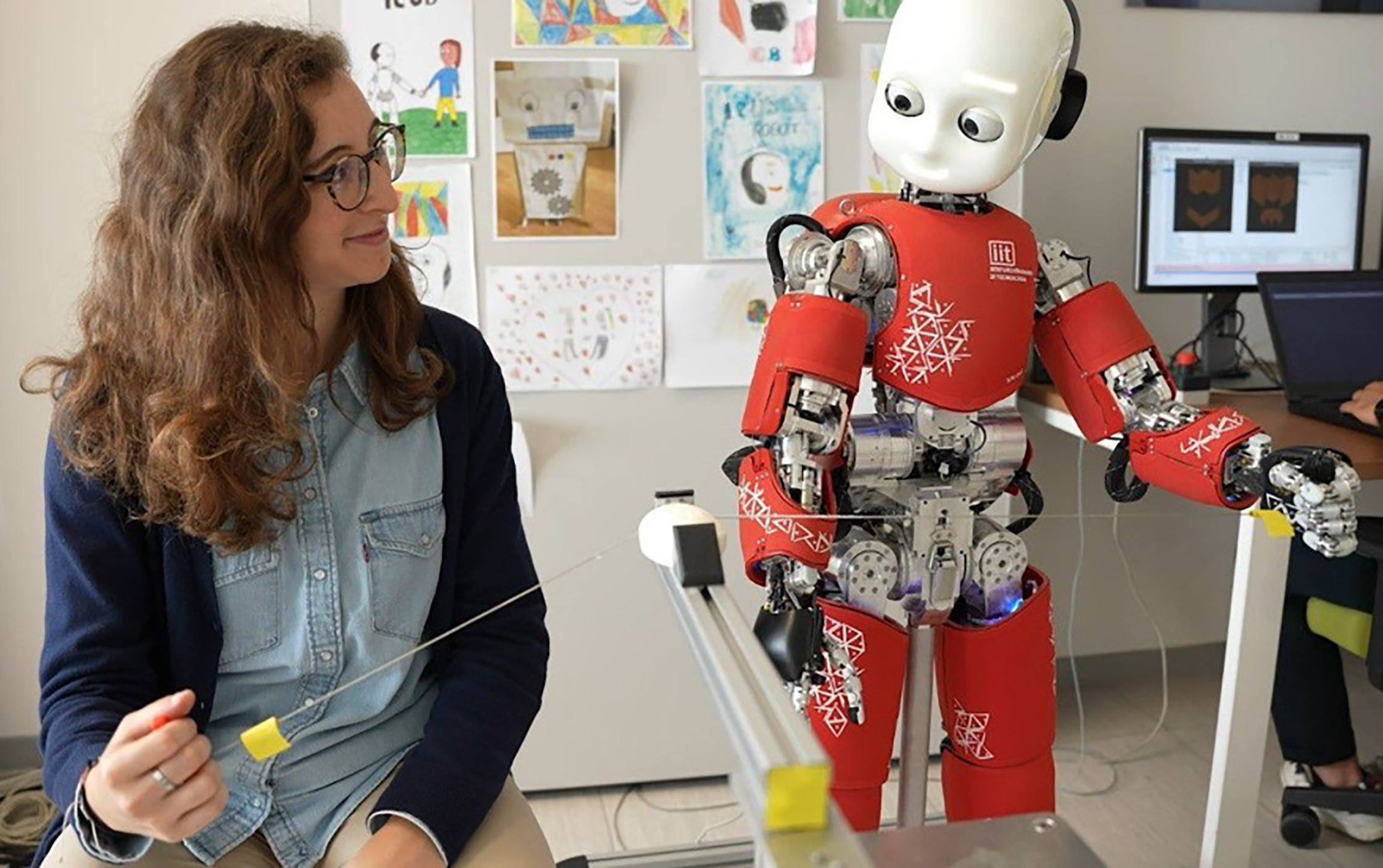
Un gruppo di ricerca dell’Istituto Italiano di Tecnologia (IIT) a Genova e della Brown University negli Stati Uniti ha dimostrato che l’essere umano percepisce la mano di un robot umanoide come parte del proprio schema corporeo, se con quel robot ha svolto un compito in collaborazione, come tagliare una saponetta. Lo studio, pubblicato sulla rivista iScience, può aiutare a migliorare la progettazione di robot impiegati a stretto contatto con l’essere umano, quale per esempio nella riabilitazione motoria.
La ricerca, guidata da Alessandra Sciutti, Principal Investigator dell’Unità CONTACT all’IIT di Genova, in collaborazione con Joo-Hyun Song, professoressa alla Brown University, ha permesso di indagare se alcuni meccanismi inconsci dell’essere umano, presenti quando si interagisce con un’altra persona, possono comparire anche di fronte a un robot umanoide.
Il personale di ricerca ha investigato un processo cognitivo, noto come near-hand effect (effetto della mano vicina), per cui la vicinanza della mano a un oggetto modifica l’attenzione visiva della persona, preparandola all’utilizzo dell’oggetto. Inoltre, ha basato lo studio sulla capacità del cervello umano di creare uno schema corporeo esteso, in cui anche gli oggetti possono essere integrati, per muoversi nello spazio circostante in modo più efficiente.
Tramite un processo inconscio e grazie a stimoli esterni, lo schema corporeo costruito dal nostro cervello è importante per evitare ostacoli o afferrare oggetti senza guardarli. In tale schema, possono essere integrati oggetti di uso comune, purché utili a svolgere un compito, come accade per esempio a un tennista con la propria racchetta usata tutti i giorni. Lo schema corporeo è in continua evoluzione e il gruppo di ricerca guidato da Sciutti ha indagato se un robot possa diventarne parte.
Giulia Scorza Azzarà, dottoranda di IIT e prima responsabile di questo studio, ha messo a punto e analizzato i risultati degli esperimenti che prevedevano un’attività congiunta tra persone e il robot umanoide iCub. L’attività consisteva nel taglio di una saponetta tramite un cavo d’acciaio tirato in modo alternato dalla persona e dal suo partner robotico.
Per verificare l’integrazione della mano robotica nello schema corporeo, i ricercatori hanno quantificato prima l’effetto della mano vicina, il near-hand effect, con un test visivo chiamato Posner. Il test sfida i partecipanti a indicare il più velocemente possibile con una tastiera su quale lato dello schermo compare un’immagine, mentre la loro attenzione è influenzata da un oggetto posizionato proprio accanto allo schermo.
Analizzando i dati di 30 persone, è emerso che la risposta visiva è più rapida quando l’oggetto usato per sviare l’attenzione è la mano del robot, dimostrando che viene percepita come “mano vicina”. Inoltre, gli esperimenti di controllo hanno mostrato che l’effetto si manifesta solo nelle persone che hanno collaborato con iCub nel taglio della saponetta.
Lo studio dei movimenti compiuti dal robot ha permesso un’analisi dei fattori fisici che modificano l’intensità del near-hand effect. Per esempio, se la mano del robot compie movimenti ampi e coordinati con l’essere umano, l’effetto della vicinanza è più marcato e maggiore è l’integrazione della mano di iCub nello schema corporeo della persona. Allo stesso modo, anche la vicinanza tra la mano artificiale e la persona contribuisce ad aumentare il senso di integrazione: più il robot riesce a entrare nello spazio personale dell’umano durante il compito, maggiore è l’intensità del near-hand effect.
Il gruppo di ricerca ha infine valutato, con dei questionari successivi all’attività congiunta, come i partecipanti percepissero il robot. L’intensità dell’effetto cognitivo è tanto più elevata quanto più i partecipanti ritengono il robot un partner competente e piacevole; anche attribuire al robot tratti umani e la capacità di provare emozioni accresce l’efficacia dell’integrazione della mano nello schema corporeo. Condivisione ed empatia sono essenziali per rinforzare i legami cognitivi con iCub.
Il gruppo di ricerca ha studiato situazioni controllate e usato un robot dalle spiccate sembianze umanoidi, aprendo la strada a una comprensione più profonda delle interazioni tra essere umano e macchina. Gli aspetti psicologici sono considerati cruciali per sviluppare robot capaci di adattarsi agli stimoli umani e di fornire un’esperienza robotica più intuitiva ed efficace in applicazioni come la riabilitazione motoria, la realtà virtuale e lo sviluppo di tecnologie assistive.
La ricerca è parte del progetto wHiSPER, finanziato con uno Starting Grant dell’European Research Council e coordinato dall’Unità CONTACT (COgNiTive Architecture for Collaborative Technologies) dell’Istituto Italiano di Tecnologia.
L’articolo di ricerca è disponibile al seguente link:https://www.sciencedirect.com/science/article/pii/S2589004225010521