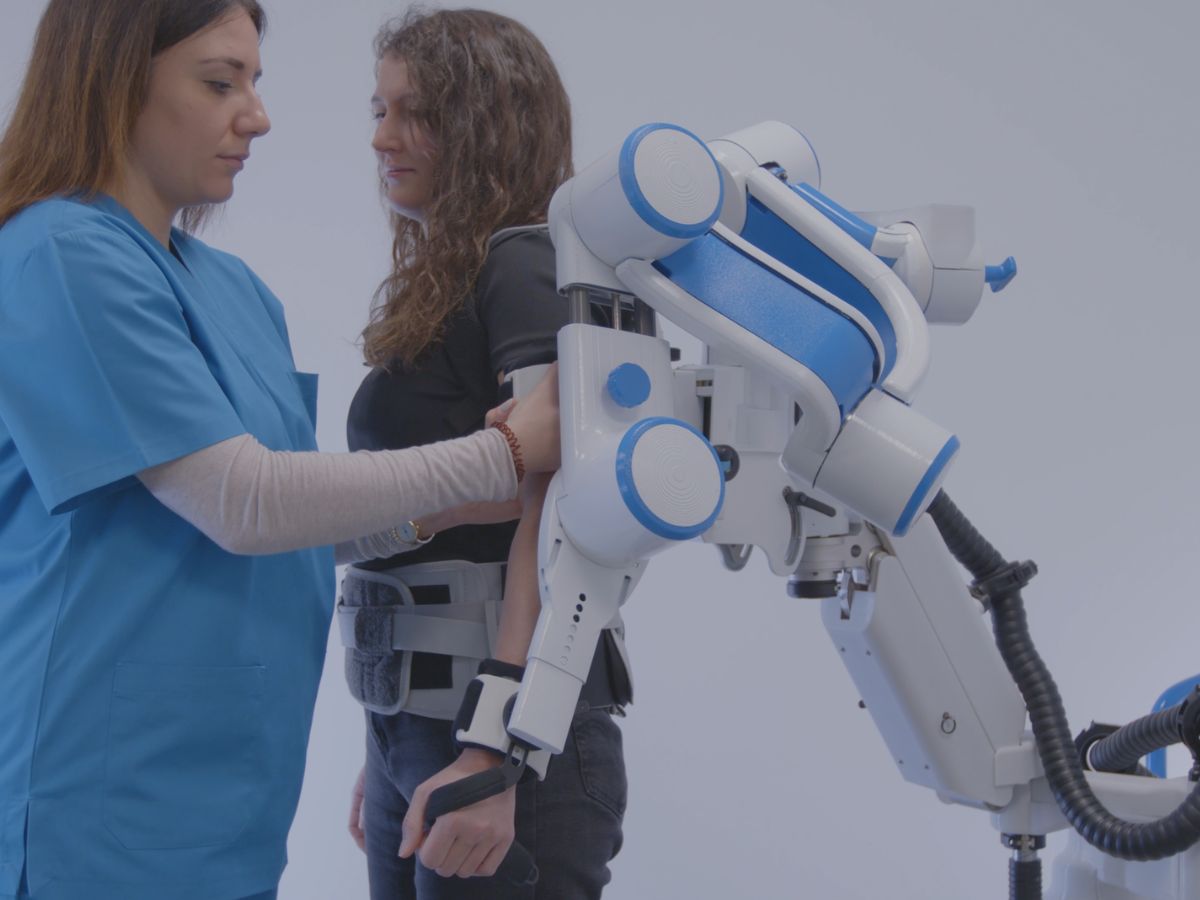
E’ il nuovo esoscheletro riabilitativo per arto superiore dell’Istituto Italiano di Tecnologia e del Centro di riabilitazione motoria Inail di Volterra
Rehab Technologies IIT – INAIL, il laboratorio congiunto frutto della collaborazione tra Istituto Italiano di Tecnologia e INAIL, ha presentato oggi a Maker Faire Rome 2024, FloatEVO: dispositivo medico robotico indossabile per la riabilitazione degli arti superiori, evoluzione del modello Float, progettato con il Centro di Riabilitazione Inail di Volterra.
FloatEVO è un esoscheletro motorizzato, sviluppato per promuovere ed accelerare il recupero motorio e funzionale del complesso articolare di spalla e del gomito non solo in seguito a lesioni ortopediche post-traumatiche o post-chirurgiche, come ad esempio lesione alla cuffia dei rotatori o intervento di protesi di spalla inversa, ma anche a seguito di lesioni neurologiche da trauma.
Questa tecnologia unisce le caratteristiche vincenti dei dispositivi automatizzati di nuova generazione, come l’alta intensità degli esercizi proposti e la precisione nell’acquisizione delle variabili fisiologiche del paziente, permettendo di misurare eventuali miglioramenti, alla nuova concezione di riabilitazione basata su uno spazio di lavoro maggiore rispetto a quello dei dispositivi tradizionali, in cui svolgere gesti funzionali realistici consentiti grazie allo specifico design.
La presenza del braccio poliarticolato passivo che consente al paziente di non percepire il peso dell’esoscheletro stesso, permette di eseguire movimenti che coinvolgono tutto il corpo, includendo gli arti inferiori e la muscolatura del tronco con una libertà di movimento più ampia rispetto a tutti i robot riabilitativi per arto superiore già esistenti. Infatti, il paziente può essere svincolato dalla postazione fissa, e svolgere attività riabilitativa muovendosi in uno spazio di circa 3 metri quadrati, interagendo fisicamente con l’ambiente reale e attivando tutti i distretti corporei coinvolti nello specifico gesto funzionale da riabilitare.
Da un punto di vista meccanico, inoltre, FloatEVO presenta una cinematica migliorata e ampliata che consente la riproduzione dei movimenti fisiologici del complesso articolare di spalla e scapola oltre alla riabilitazione attiva anche dell’articolazione del gomito.
Questa nuova caratteristica permette ai clinici di impostare protocolli riabilitativi personalizzati per ogni paziente, mirati al recupero delle funzionalità di base della vita quotidiana, come ad esempio bere o mangiare in autonomia, toccarsi la schiena o la testa.
La nuova versione prevede anche l’implementazione dei giunti con specifici sensori, estremamente sensibili, che rilevano le forze di interazione con il paziente consentendo di sviluppare controlli più fini, adatti e personalizzabili anche a pazienti neurologici.
Inoltre, sulla base dei feedback registrati durante lo studio clinico su pazienti ortopedici condotto con FLOAT presso il Centro di riabilitazione Motoria Inail di Volterra, la nuova versione è stata progetta in modo che sia maggiormente adattabile alle diverse antropometrie delle persone che lo utilizzano, più compatta, con un sistema di vestizione/svestizione più rapido e pratico per agevolare il lavoro dei fisioterapisti e con un innovativo sistema di ribaltamento. Quest’ultima caratteristica permetterebbe di ottimizzare i costi del dispositivo, adattandolo per la riabilitazione del braccio sinistro e di quello destro utilizzando un solo esoscheletro robotico ribaltabile.
In particolare, la massima versatilità del dispositivo alle diverse corporature dei pazienti, che ora può adattarsi dal 1° percentile donna al 99° percentile uomo, è stata raggiunta grazie a interventi sul design, tra cui la colonna telescopica motorizzata che permette di adattare il dispositivo in base all’altezza del paziente, la regolabilità dei link meccanici che si adattano alle lunghezze del braccio del soggetto che indossa l’esoscheletro e la regolazione del corsetto che connette il tronco della persona all’esoscheletro, sia sul piano sagittale che su quello frontale.
Per velocizzare la fase di indossamento e rimozione delle fasce di vestizione, che vincolano il paziente a livello del braccio e dell’avambraccio, è stato progettato un sistema magnetico “quick disconnect” su misura.
Per quanto riguarda la parte software, il controllo del dispositivo avviene attraverso uno schermo touch (panel PC) montato sulla base del dispositivo stesso. L’interfaccia grafica semplice e intuitiva consente ai terapisti di scegliere la modalità di funzionamento desiderata e personalizzare la sessione riabilitativa sul singolo paziente.
Le modalità operative, già presenti in Float, sono state ottimizzate e in più ne sono state sviluppate di nuove.
La modalità “Cinematica” presenta un range di movimento ampliato rispetto a quella della precedente versione e permette la mobilizzazione passiva anche del gomito.
La modalità “Ripeti Traiettoria” consente al terapista di guidare l’arto del paziente e l’esoscheletro lungo traiettorie complesse e di memorizzarle, registrando traiettorie più estese, che includono anche il movimento del gomito, garantendo una riabilitazione più completa e adattabile rispetto alla versione precedente. Inoltre, la modalità “Assistiva” garantisce al paziente movimenti fluidi e senza resistenze: il paziente si muove liberamente nell’esoscheletro e il terapista può attivare assistenza in elevazione e supporto nel ritorno, regolando il livello in base alle necessità. La libertà di movimento garantita dal braccio poliarticolato e dal sistema di sospensione di FloatEVO è particolarmente utile nella terapia occupazionale per il recupero delle attività quotidiane e per l’esecuzione di attività funzionali. La nuova modalità “Assist as Needed” consente l’esecuzione di esercizi elementari basati su traiettorie predefinite potendo contare su un’assistenza (bassa, media e alta) regolabile dal terapista.
Il paziente è attivamente coinvolto durante l’esecuzione dell’esercizio ma, in caso di spasmi o dolori, la macchina ha la possibilità di deviare dalla traiettoria di riferimento reagendo in modo cedevole. Inoltre, il supporto fornito dal dispositivo è proporzionale a quanto il paziente si discosta dalla traiettoria di riferimento.
Infine, il dispositivo FloatEVO presenta sui link meccanici un sistema di sicurezza per il pericolo di intrappolamento da parte del paziente o dell’operatore: durante l’esecuzione di un task riabilitativo, se il clinico o il paziente toccano gli switch di rilevamento posti sui link dell’esoscheletro, quest’ultimo si blocca in posizione evitando di creare situazioni pericolose. Questa funzionalità è un passo ulteriore verso la conformità delle normative vigenti e avvicina ulteriormente il dispositivo alla marcatura CE e alla sua futura industrializzazione.
“FloatEVO è un esoscheletro con caratteristiche innovative, utilizzabile anche in posizione eretta e con il corpo intero in movimento: risponde a un concetto di riabilitazione robot-assistiva che va verso la terapia occupazionale e quindi consente precocemente ai pazienti con disfunzione della spalla di origine sia ortopedica che neurologica di cimentarsi con gesti funzionali già in fase di riabilitazione post acuta, interagendo fisicamente con l’ambiente reale invece che limitarsi a esercizi di game therapy in ambiente virtuale” Elisa Taglione Direttore sanitario Centro di riabilitazione motoria Inail di Volterra.
“Grazie ad un concept unico nel suo genere, basato sul braccio poliarticolato passivo che sorregge il peso della macchina permettendo al contempo al paziente di muoversi nello spazio e riabilitare gesti funzionali anche avanzati, e sui moduli motore che, essendo estremamente sensibili, sono capaci di dosare la forza, FloatEVO permette di intervenire con la riabilitazione robotica in tutte le fasi di recupero del paziente. – dichiara Matteo Laffranchi Coordinatore del laboratorio Rehab Technologies IIT – INAIL – Inoltre, FloatEVO può guidare il paziente tramite movimenti estremamente fluidi e personalizzati che sono “insegnati” al dispositivo direttamente dal terapista, che lo guida proprio come se avesse a che fare con un braccio umano”.