Il robot è stato disegnato e costruito da IIT nell’ambito di un progetto finanziato dall’ESA, in collaborazione con Leonardo S.p.A and GMV
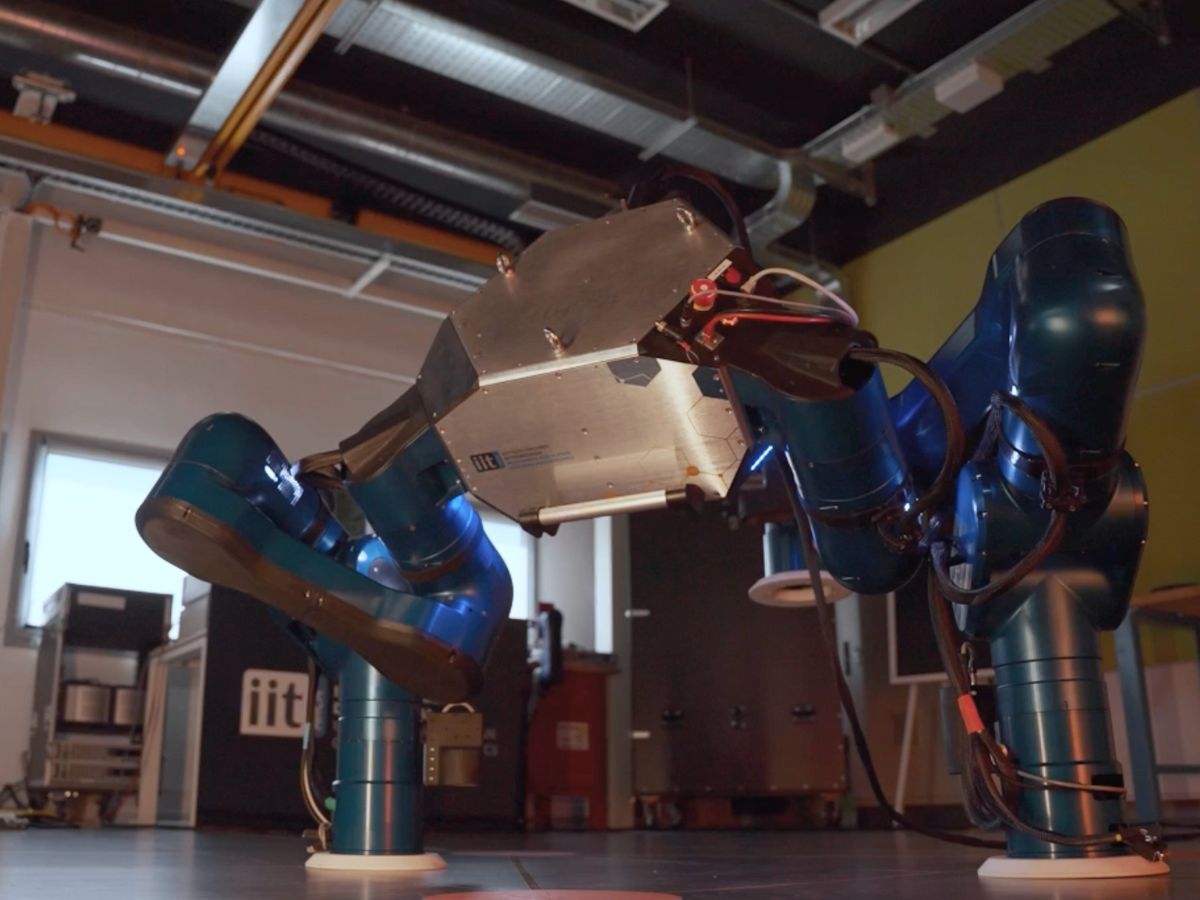
I ricercatori dell’Istituto Italiano di Tecnologia (IIT) hanno realizzato una nuova piattaforma robotica da utilizzare in operazioni nello spazio. Il robot, dal nome MARM, ha tre arti che possono essere usati per camminare, muoversi, afferrare e trasportare moduli pesanti all’interno di infrastrutture spaziali in situazioni di microgravità. Il robot è stato realizzato con l’intento di assistere gli astronauti nell’assemblaggio e manutenzione delle infrastrutture spaziali, mentre sono in orbita o, nel futuro, anche su altri pianeti. Il prototipo sarà testato in scenari di simulazione, così da prepararlo ad una versione adeguata per un’applicazione reale.
L’esplorazione spaziale rappresenta un campo di applicazione unico per la robotica, poiché presenta condizioni, ambienti e opportunità tali da dovere sviluppare piattaforme del tutto nuove. Infatti, se le tecnologie per il controllo, il movimento e la manipolazione di robot sulla Terra sono ad uno stato avanzato, al contrario le condizioni ambientali proprie dello spazio, come per esempio la microgravità, rappresentano ancora una sfida per la comunità scientifica.
Il nuovo robot MARM nasce nell’ambito del progetto MIRROR (Multi-arm Installation Robot for Readying ORUs and Reflectors), finanziato dall’European Space Agency (ESA), che ha proprio l’obiettivo di identificare nuovi strumenti robotici per assistere gli astronauti nelle operazioni spaziali, quali l’installazione, manutenzione, controllo e riparazione delle infrastrutture. I ricercatori di IIT hanno ideato il robot MARM (Multi-Arm Relocatable Manipulator), un prototipo di sistema robotico in grado di realizzare diversi compiti, come per esempio afferrare, manipolare, trasportare e assemblare moduli, mentre si muove all’interno dell’infrastruttura spaziale.
Il robot è stato disegnato e realizzato dallo Human and Humanoid Centered Mechatronics Lab dell’IIT a Genova, coordinato da Nikolaos Tsagarakis, in collaborazione con Leonardo S.p.A e GMV. MARM è l’ultima creazione del team di ricerca di Tsagarakis, già autore del robot umanoide WALK-MAN e del robot Centauro, e attualmente a lavoro sullo sviluppo dei robot collaborativi modulari e configurabili Concert, finanziati dall’Unione Europea.
La piattaforma robotica MARM è costituita da un corpo centrale, tre arti e un dispositivo di espansione utile sia per l’alimentazione che per ricevere e spedire dati. La sua struttura è stata realizzata seguendo un disegno realizzato a computer, considerando due criteri chiave: la mobilità e la flessibilità del robot. I ricercatori, infatti, hanno provato diversi modelli di struttura, con arti più o meno lunghi, giunti e connettori diversi, fino ad ottenere il disegno migliore, con capacità di movimento e trasporto ottimali sia in assenza che in presenza di gravità.
Il robot può usare i tre arti per muoversi nell’ambiente, afferrando le strutture standard presenti nelle stazioni spaziali e strisciandovi sopra, e per assemblare e posizionare componenti – come per esempio i moduli esagonali di circa 12 chilogrammi – o manipolare le unità di sostituzione orbitale.
Gli arti di MARM, connessi a una base centrale, rappresentano la differenza principale rispetto ad altre tecnologie: danno al robot una maggiore flessibilità di movimento e manipolazione e, nello stesso tempo, una più ampia gamma di azioni, come per esempio il trasporto di carichi pesanti, il loro assemblaggio e installazione, anche usando due mani.
Inoltre, la presenza di tre arti garantisce al robot la capacità di svolgere movimenti con tutto il corpo restando in posizione; inoltre, durante le operazioni di manipolazione, gli arti che ancorano il robot per terra possono agire sulla posizione della base centrale così da ridurre le forze trasferite sulle travi delle strutture.
Lo scenario di utilizzo prevede che il robot MARM sarà capace di usare i propri componenti elettronici, grazie anche a un continuo ritorno sensoriale dall’ambiente, di afferrare un carico da un magazzino, spostarsi mentre lo porta, assemblarlo e posizionarlo nel posto desiderato.
Il prototipo sarà testato in una prova di simulazione, così da validare ogni sua parte e preparare la versione pronta per un’applicazione reale nello spazio.