Un gruppo di ricerca dell’Istituto Italiano di Tecnologia (IIT) ha dimostrato che gli esseri umani possono trattare i robot come co-autori dei risultati delle loro azioni
Un gruppo di ricerca dell’Istituto Italiano di Tecnologia (IIT) ha dimostrato che, in circostanze specifiche, gli esseri umani possono considerare i robot umanoidi come co-autori dei risultati delle loro azioni. Il requisito chiave che rende possibile questo fenomeno è la presenza di un robot che abbia un comportamento simile a quello umano, con aspetti di socialità, quali nello specifico stabilire un contatto visivo e partecipare a una stessa esperienza emotiva, come per esempio guardare un film. Lo studio è stato pubblicato su Science Robotics e apre la strada alla comprensione e alla progettazione delle condizioni ottimali per la collaborazione tra umani e robot nello stesso ambiente.
Lo studio di ricerca è stato coordinato da Agnieszka Wykowska, direttrice del laboratorio “Social Cognition in Human-Robot Interaction” dell’IIT di Genova, e beneficiaria di un finanziamento dell’European Research Council (ERC) per il progetto intitolato “Intentional Stance for Social Attunement”, che affronta la questione di quando e in quali condizioni le persone trattano i robot come agenti intenzionali.
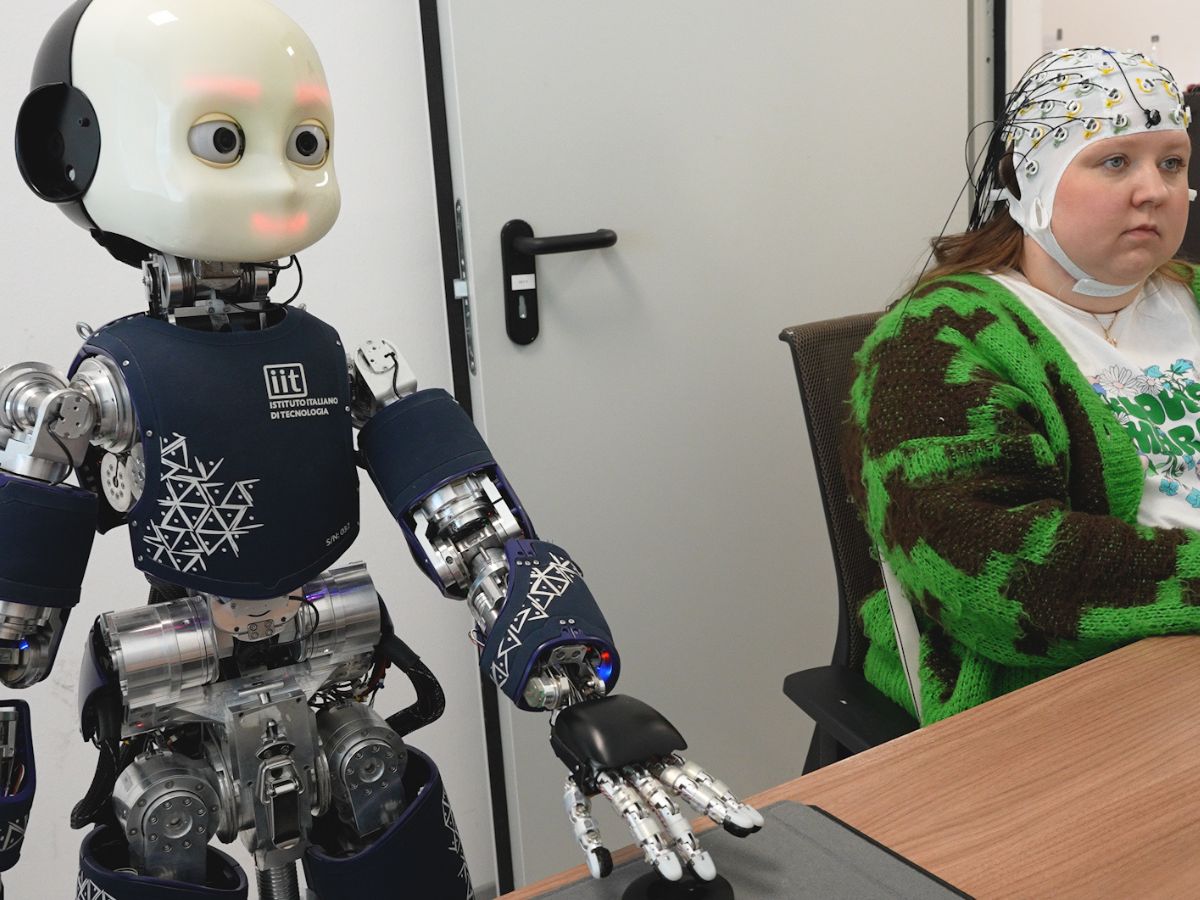
Uma Navare, prima autrice dell’articolo e ricercatrice membro del team di Wykowska, ha condotto lo studio utilizzando strumenti di misura del comportamento e registrando le risposte neurali dei partecipanti tramite elettroencefalografia (EEG). I dati raccolti sono stati necessari a valutare l’emergere di un meccanismo di senso di controllo dell’azione condiviso tra gli esseri umani e il robot umanoide iCub.
“Gli esseri umani non agiscono in un vuoto sociale e la maggior parte delle nostre azioni richiede coordinazione con altri nello spazio e nel tempo per raggiungere un obiettivo. Un aspetto cruciale dell’interazione con gli altri è l’esperienza di quello che viene chiamato senso di azione condiviso“, spiega Agnieszka Wykowska. “Nel nostro studio di ricerca abbiamo scoperto che gli esseri umani sperimentano questo senso di azione condiviso con il partner robotico, quando il robot è presentato come un agente intenzionale, ossia quando il suo comportamento è simile a quello di un essere umano, ma non quando il robot è mostrato come un artefatto meccanico“.
Il senso di azione condiviso si riferisce alla sensazione di controllo che gli esseri umani sperimentano sia per le proprie azioni che per quelle del loro partner, sottolineando così la costituzione di una squadra. Il gruppo di ricerca dell’IIT ha affrontato tale questione, prima identificandone i meccanismi nelle interazioni tra gli esseri umani e poi verificando se risposte simili fossero presenti nell’interazione tra umani e robot umanoidi. Nello specifico, è stato sviluppato un compito interattivo in cui esseri umani e robot dovevano coordinarsi al fine di raggiungere un obiettivo condiviso. Il compito consisteva nell’alternarsi nel muovere un cursore sullo schermo verso una posizione di arrivo e poi confermare la posizione del cursore sopra di essa, attivando così un suono.
Il gruppo di ricerca ha svolto due esperimenti, durante i quali ha manipolato la possibilità o meno di attribuzione di intenzionalità nei confronti del robot umanoide iCub. Nel primo esperimento, iCub ha eseguito un compito meccanicamente, portando i partecipanti a vederlo come un artefatto meccanico. Nel secondo esperimento, i partecipanti hanno prima interagito con iCub in modo da aumentare la probabilità di attribuirgli intenzionalità: vi è stato un dialogo, uno scambio di sguardi e la visione di un video insieme, durante cui iCub ha mostrato risposte emotive simili a quelle umane. Questo mirava a far percepire iCub ai partecipanti come più intenzionale e simile a un essere umano.
I ricercatori hanno scoperto che solo nel secondo esperimento gli esseri umani hanno provato un senso di azione condiviso con il robot, evidenziato sia nelle risposte comportamentali che in quelle neuronali.
Il risultato mostra che una vera collaborazione con un robot è più probabile quando il robot è percepito come un agente intenzionale e sociale, anziché quando appare come un dispositivo meccanico. Il lavoro di ricerca, quindi, contribuisce a identificare quali sono le condizioni ottimali affinché umani e robot collaborino verso obiettivi condivisi nella loro vita quotidiana.
Per approfondire: https://www.science.org/doi/10.1126/scirobotics.adj3665